
GSoC- End of first coding month- Analysis
It has been one month since the coding period of 2017 Google Summer of Code officially began, and it was an awesome experience! In this post, I will look back at the work done in the last month, what went right and what went wrong.
Useful Links
- GSoC 2017 Proposal
- Phabricator Task Link
- GSoC 2017 Status Report
- Development branch: gsoc_rudra_submarine
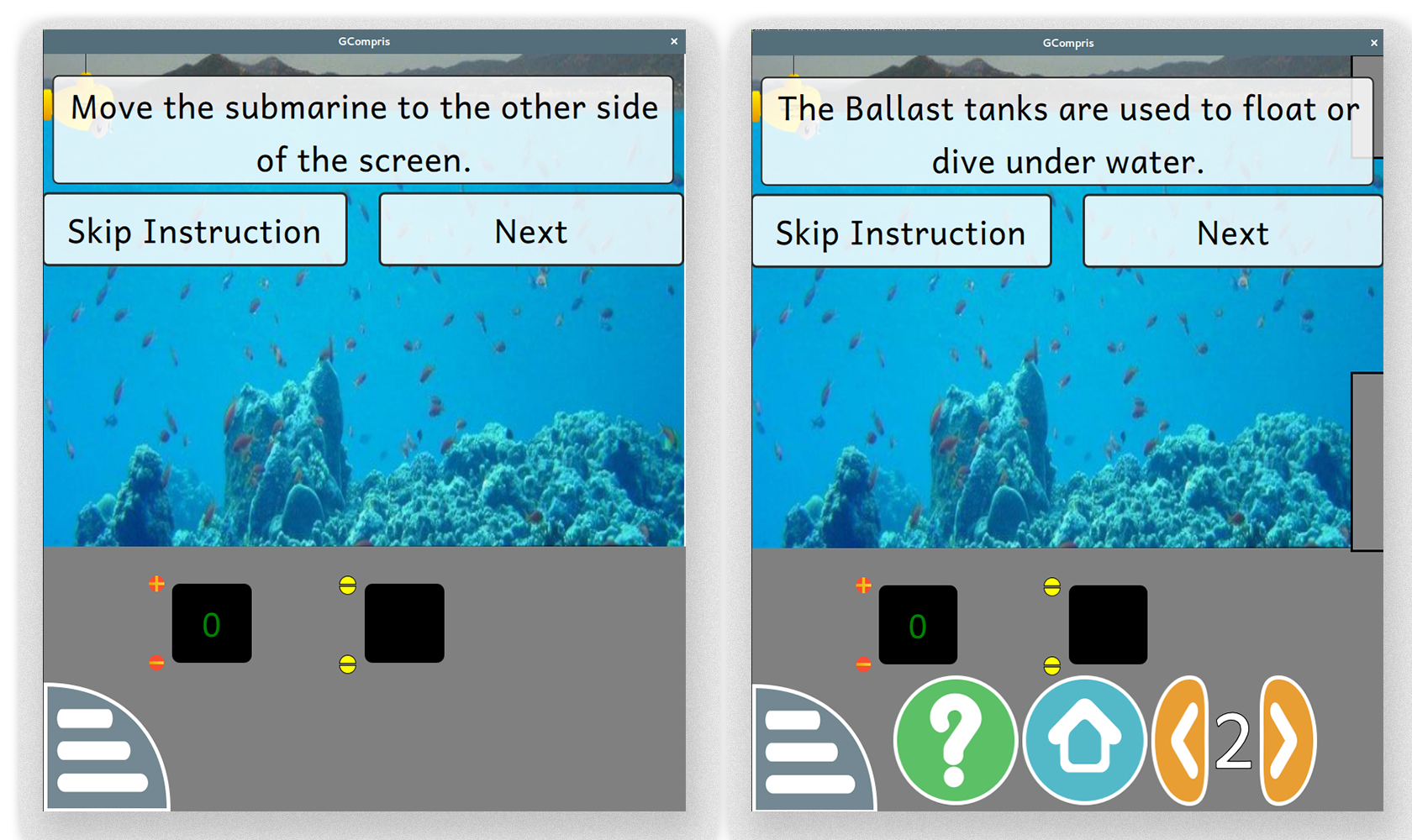
Pilot a submarine
The goal of the activity is to learn how a submarine works, focussing on the engines, rudders and the diving planes. The activity currently has:
- A total of 10 levels
- Physics and collision detection using box2d

- The initial 3 levels are tutorial levels, giving an explanation of how each of the three components (engine, rudders and diving planes)
- Pickups, in the form of jewels like it was present in the gtk+ version
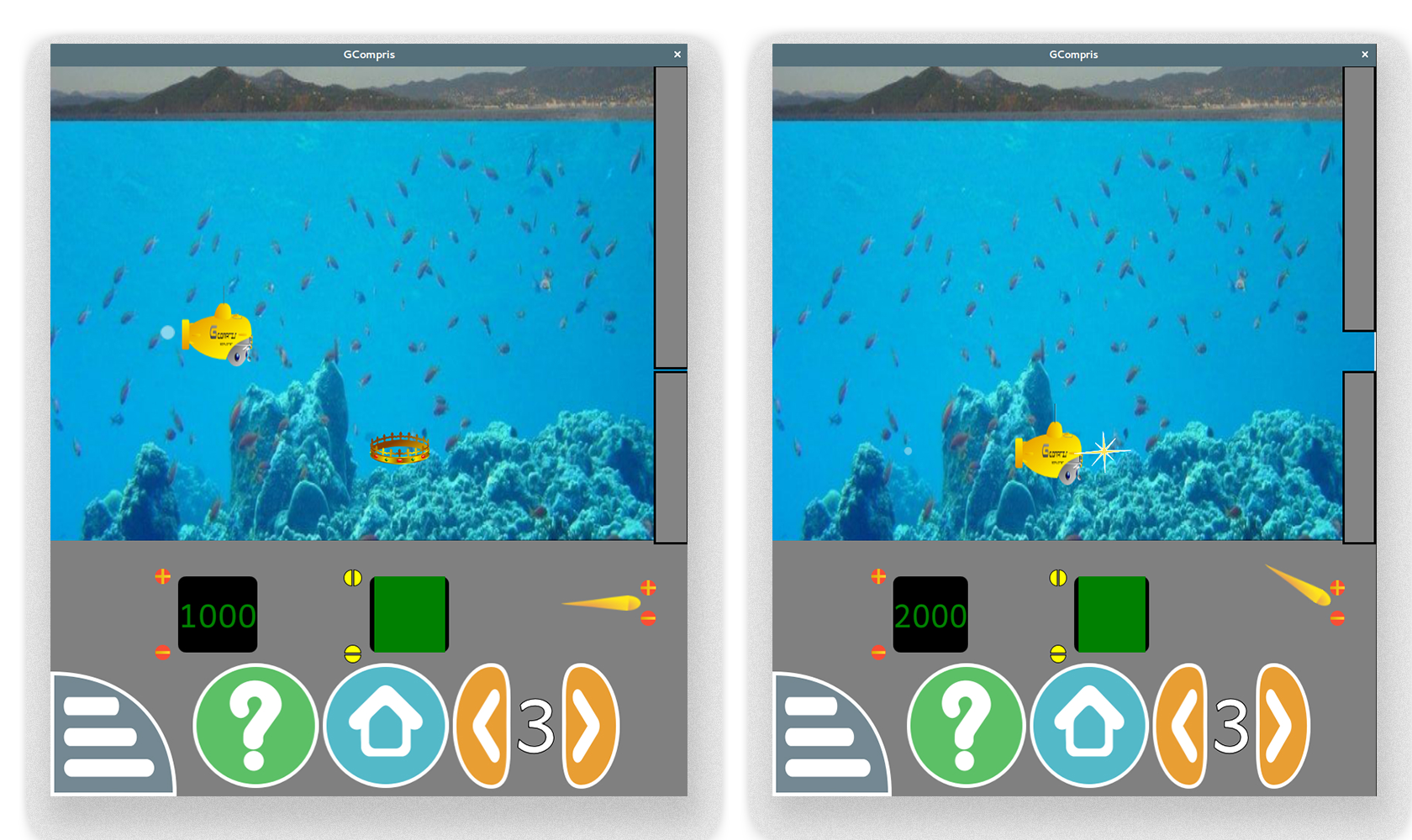
- Threats in the form of rocks in the latter levels to make the activity more challenging
- A control panel in the bottom of the screen to control the submarine, which is aimed at making simple enough for children to understand quickly
What went right
- The planning: Almost everything went as planned (will explain the “almost” part later). The core mechanics came up pretty quickly, allowing me to move on to the polishing/bug fixing part very soon. . Polishing generally means to go through the following cycle as many times as possible:
- Coming up with an idea
- Conceptualising it
- Implementation of the idea
- Evaluation of the implemented idea
Also, I spent quite a lot of time looking up at various resources online which helped me implement these features
- Time Management: Time management has been crucial during this period. I planned to implement the basic features as fast as possible to make sure that I get enough time for testing and polishing the activity. Thankfully, the implementations were completed before the scheduled date, allowing me to jump right into the bug fixing and improvement stage
What didn’t go as planned
- As mentioned earlier, “almost” everything went as planned. The vertical velocity of the submarine is one exception. The vertical velocity of the submarine is affected by two components:
- The Ballast Tanks and
- The Diving Planes
Implementing the Diving plane was easy, and so was implementing the Ballast tanks. But the problem arrised while integrating the above two in a single unit. There were lots of corner cases which I didn’t expect initially. As of now, I settled with the following, which seems to work much better:
// check if the submarine is currently being operated
// under Ballast tanks or under the diving planes
if (submarine.y > 0 && submarine.velocity.x > 0 && wingsAngle != 0) {
// currently under the influence of diving planes
} else {
// currently under the influence of Ballast tanks
}
var targetDepth // the final depth to which the submarine should dive/rise
if (currently under diving planes) {
// multiplier determines the depth, depending on the wings angle
targetDepth = multiplier * maximum depth
} else {
targetDepth = (amountOfWaterInTanks / totalCapacityOfTanks) * maximumDivingDepthOnFullTank
}
depthToMove = targetDepth - submarine.y
submarine.velocity.y = maxVerticalSpeed * (depthToMove / totalDepth)
Looking forward
Currently, Pilot a Submarine is under testing and bug fixing / improvements stage. After that, I will move on to start working on the Family activity. If you are willing to try it out yourself, it is currently in the gsoc_rudra_submarine branch. Hope you enjoy playing around with it just a fraction of how much we enjoyed making it.
Let me know what you think of this article on twitter @RudraNilBasu or leave a comment below!